
Testeur de Servomoteur
22 avril 2011
Ce testeur contrôle la position du servomoteur qui lui est relié à l'aide d'un potentiomètre / d'une résistance variable. Signal de commande de servomoteur
Signal de commande de servomoteurLa position d'un servomoteur est contrôlée par un signal carré, où seule compte l'impulsion haute. L'impulsion à l'état haut dure de 1ms, pour aller complètement à gauche, à 2ms pour aller en butée à droite. La durée totale entre deux impulsions ne doit pas excéder une vingtaine de millisecondes pour que le servo maintienne sa position de façon stable.
Pour générer ce signal, on peut utiliser un NE555 (ou sa version CMOS) en mode astable.
Le datasheet du NE555 nous dit que, en mode astable, l'état haut dure t1 = 0.693*(R1 + R2)*C1, et l'état bas dure t2 = 0.693*R2*C1. Ainsi la durée totale T entre deux impulsions est t1+t2.
En prenant R1 = 100k, C1 = 100nF et un potentiomètre de 100k pour R2, on obtient une durée totale maximale de T = 21ms, minimale de 14ms, et un état bas qui peut varier entre 0 et 7ms.
Il suffit donc d'inverser le signal pour avoir notre signal de commande du servomoteur, c'est à dire un signal où l'état haut peut avoir une durée de 1ms à 2ms et où la période du signal ne dépasse pas 20ms.
On pourra donc obtenir une impulsion de 0ms à 7ms en tournant le potentiomètre R2. Le servomoteur tournera donc de la même façon que le potentiomètre.
Voici le schéma (Télécharger - format proteus) :
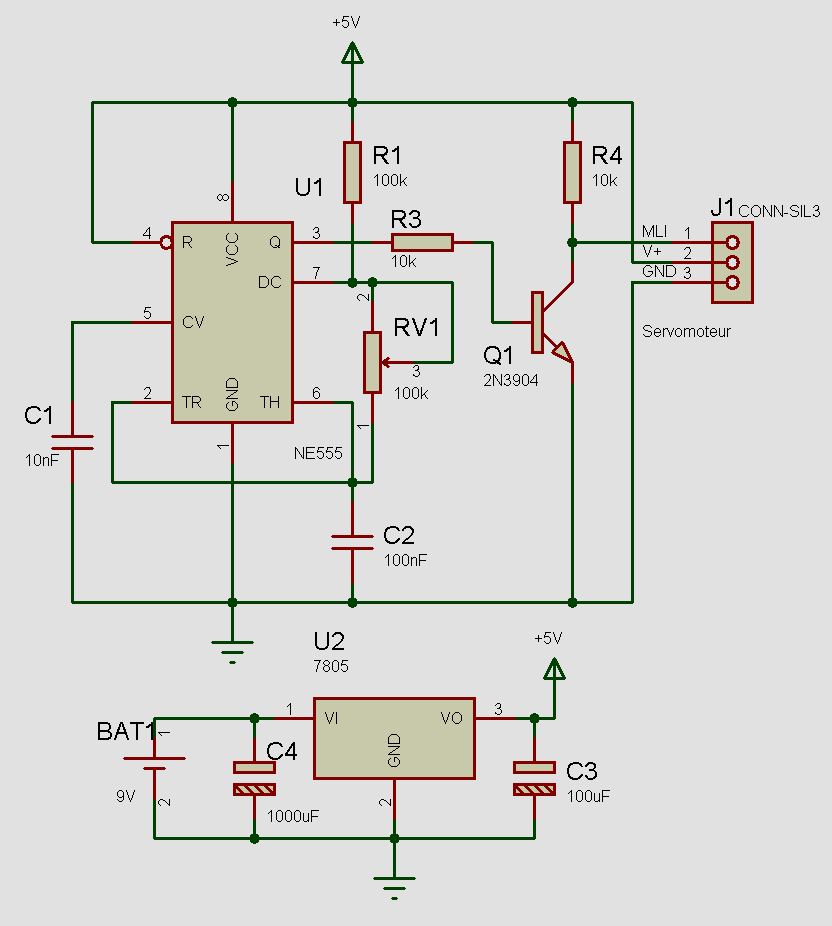
Q1 est utilisé pour inverser le signal. Vous pouvez utiliser n'importe quel transistor NPN standard pour Q1.
Sur le schéma RV1 correspond à R2 du calcul, et C2 à C1 du calcul.
 Cliquez pour agrandir
Cliquez pour agrandirLe prototype (image de droite) fonctionne parfaitement, le potentiomètre à une zone 'morte' : le servo ne bouge pas lorsque la durée d'impulsion est inférieure à 1ms et supérieure à 2ms.